ROV / AUV Sonar – ISS360 Live Question & Answer Session.
Transcript
Hello welcome to this week’s live session from Impact Subsea on YouTube. This week I’ll be answering any questions you have on Impact Subsea sensors and systems. I’m Ben Grant, Managing Director at Impact Subsea.
Now for the last few weeks we’ve covered a number of different sensors; we’ve looked at our ISA500 Altimeter Range, our ISM3D Heading, Pitch and Role Sensor Range and our ISD4000 Depth and Temperature Sensor.
ROV / AUV Sonar ISS360 Introduction
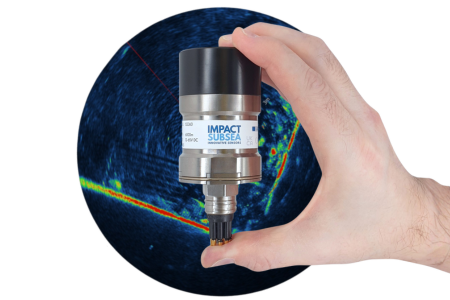
This week I thought we’d start things off by having a quick discussion over ROV / AUV Sonars – ISS360. So we offer two ISS360 sonars, we have the original ISS360 which is an extremely compact Imaging Sonar. It’s a mechanically scanning sonar. It gives you a full 360 degree vision around about you. Up to a distance of 90 meters away and it has a very high range resolution of 2.5 millimeters so it gives you really clear imagery.
It’s very compact, you’ve got a titanium housing with a subconn connector and a standard eight pin subconn that we use in all of our sensor solutions. The same wiring as every other sensor we do as well. Inside the boot end here, you’ve got an oil filled section with a transducer in there which rotates round much like a miniature radar but for underwater use. Now, you can see the type of imagery which is produced by the sonar behind me.
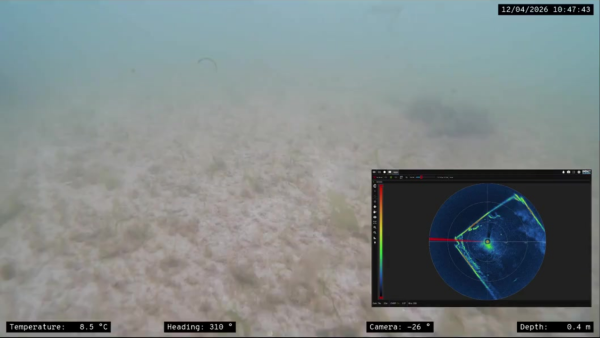
You’ve got, one of our sonars have been placed into our test tank here which is a circular, two meter diameter test tank. On the screen you get the kind of top down view of the test tank and you can see the sonar scanning around and that’s shown by the red line rotating around the screen there.
That’s the ROV / AUV Sonar – ISS360 and it’s ideal for ROV and AUV operations, for obstacle avoidance, general awareness of where your vehicle is placed.
ROV / AUV Sonar ISS360HD Introduction
We also offer the ISS360HD which is a bigger version of the sonar and effectively gives you a much higher angular resolution. This is ideal for very high resolution imagery and slightly longer range performance.
The ISS360HD which range out to 100 meters and it’s got a one degree beam width. it’s a very fine slice as opposed to the 2.3 degrees of the ISS360. In terms of physical build, the body is the same as ISS360, as is the connector, as is the pin out.
The main change with the ISS360HD is the boot end. To get the higher angular resolution we need a much wider transducer in there so we’ve got a very wide composite transducer and then the boots extended out, oil filled, there’s a larger diaphragm on top there just to compensate the oil in the boot. As the sonar goes deeper in the water.
The ISS360HD is depth rated down to 6,000 meters ISS360 is depth rated down to 4,000 meters as standard but we do also do a 6,000 meter rated option.
What is the vertical angle of the ISS360 and ISS360HD?
We get asked lots of different questions about sonars and some of the common ones we get asked about is the vertical beam angle between the sonars. With the ISS360 standard sonar it’s got a 2.2 degree beam by 23 degrees like that and that’s ideal for general obstacle avoidance and navigation purposes. The ISS360HD has a 30 degree beam that way and a one degree beam that way. It’s more than twice the angular resolution for ISS360.
How fast does the ISS360 scan?
Another question which often comes up, particularly when discussing scanning sonars is; how quickly does the sonar scan? If you look at the YouTube page or the ISS360 page of our website there’s a lot of example videos which show you the scanning speed at different ranges and different resolutions.
I can also show you the scanning speed just now. Behind us we’ve got an ISS360 sonar in our tank and it’s currently scanning a two meter range, at its lowest resolution setting. What you’re seeing there is the fastest rate which the sonar will scan. That particular sonar is running over Ethernet Communications back to the computer.
I can adjust the scan speed as there’s a little slider bar at the bottom of the screen so you can adjust from the high speed to high resolution and as it’s set to high speed just now, move it up to a higher resolution and higher quality you’ll see the sonar slows down.
As we start to get a much higher resolution, more accurate image of the tank.
Can it be used for obstacle avoidance or navigation?
It’s really designed so if you’re using the sonar for obstacle avoidance you can set it to the fast speed, you just need to know, is there something in front of me? or can I locate a target around you scans round really fast, updates fast, then we get closer to the target you can slow it down a little bit, move it more into the quality setting so you get a higher resolution image and then you can use that for target identification.
You also don’t need to do a full 360 degree scan, you’ve got it there if you need it so if you’ve got it on the top of your vehicle and you want to see everything that’s around you and kind of position yourself relative to another structure or something else subsea, it’s ideal for that. If you just want it for forward-looking obstacle avoidance you can set up a window, I’ll show you that just now.
Let’s turn off full 360 and just do a sector scan. Set it to a 90 degree sector scan just now. We’ll just zoom in so we’ve got that on screen. So there’s your 90 degree sector and it’s just scanning back and forth, giving you an update right there.
You can also set it to use flyback so if we set it to use flyback, it’ll scan one way then zoom back to the other side, scan one way, zoom back to the other side and just gives you a faster update rate. So using flyback and if we drop it to the faster speed setting you get really fast updating scanning sonar it’s ideal for forward-looking navigation.
Which ROV / AUV Sonar – ISS360 is the right one for my application?
Another question we sometimes get asked is which ISS360 sonar is right for my application? That really comes down to exactly what you require. If you need a sonar which is as compact as is practically possible then the ISS360 is ideal and you get a really compact sonar, we believe it’s the smallest imaging sonar in the world. It’s highly compact, it’s pretty lightweight and it’s quite a little power consumption so it’s ideal for a lot of miniature ROVs and a lot of small or even larger AUVS as well, where power is a consideration.
If on the other hand you can accommodate a slightly larger sonar such as maybe on a work class ROV or mid-range ROV then the ROV / AUV Sonar ISS360HD is ideal. This way you benefit from more than twice the angular resolution and you get slightly more range as well as it really comes down to what you can fit on your vehicle and what kind of performance levels you require from the sonar.
How can I interface to the ROV / AUV Sonar ISS360?
One of the other questions we get asked is how can I interface to my ROV / AUV Sonar ISS360? We’ve got a number of options as standard in all ISS360 sonars they all come with serial communications so they come with RS232 Communications and RS485 Communications. RS232 is ideal if you’re running it over a short cable length or up through a fiber mux, up to the surface from your ROV.
Then you’ve got RS485 Communications which is ideal if you just have a screened twisted pair and you can run RS485 comms anywhere up to 1.2 kilometers worth of cable. We’ve tested these ourselves up to a kilometer with the cable so it’s quite a practical way to get comms.
The other way you can get comms is through Ethernet. Ethernet is, from a performance perspective, the most ideal communications protocol as it has plenty of bandwidth so the sonar can scan really quickly and there’s no waiting for the data to be sent from the surface. Everything just gets sent in real time so if you have Ethernet capability available it’s always ideal to use that. It should be the fastest scanning sonar possible.
Do I need to return for regular maintenance?
One of the other questions we get is with regards to maintenance and how often do you have to send this back for servicing?
With all our products we try to make them so the maintenance interval is very long and so they’re designed to run for as long as it’s practically possible in the field without being serviced. All the sonars have a titanium body so you don’t have any corrosion issues. It should last a good long time.
They’ve got a stainless steel connector. Something else that sometimes wears out on scanning sonars is the slip rings. Usually you have a transducer in the boot end which rotates round and it’s connected back to the electronics using slip rings and brush contacts on the slip rings. Over time as it’s a physical contact, it will suffer from wear and tear and you have to send it back to get it swapped out.
With the ROV / AUV Sonar ISS360 Series we did away with slip rings so the transducer is fully inductively coupled to the electronics. As the transducer rotates there’s no physically touching components, there’s nothing to wear out, there’s nothing to require to come back periodically.
Although it’s got a moving transducer in there, moving component, nothing’s touching so it’s a very long life. The main thing you maybe want to send it back for, for service is just a health check and also it allows us to change out the rubber components, to change O-rings and keep all that in good condition.
What software do I use?
I’ve got a question in just now which is: What software are we using? We provide the seaView Software which you can download from our seaView Software page. You can download it free of charge.
The seaView Software runs all our sensors, it runs the altimeters, depth sensors, heading sensors and of course the sonars. In terms of the software, seaView will provide full functionality of the sonar so you can view data, you can log data, you can play back data, you can configure your sonar, it makes it really easy to use.
If you have an application where you don’t want to use our software or you want to directly interface it to an AUV control system or you want to write your own software, we do also provide a software development kit which will provide all functionalities you can get in seaView, provides that direct interface to the sonar and that’s freely available for all of our products.
So that’s a kind of overview of some of the most common questions we get on our ROV / AUV Sonar Series. If you want to learn more about the ISS360 we’ve got a Sonar page on our website which has the the datasheets, manuals, 3D models, lots of videos showing it running, lots of images in the gallery showing exactly what kind of data you can get from the sonar and we also have a few articles on our website which go into detail about the technical performance of the ISS360 Sonar and how we achieve the image quality and the range capabilities which we have.
That’s all from me today, any questions please drop us a line at support@impactsubsea.co.uk and I look forward to seeing you again next week.
Bye for now.
► OUR PRODUCTS ◄
► SUBSCRIBE ◄
► LETS CONNECT: ◄
► GET IN TOUCH ◄
EMAIL: info@impactsubsea.co.uk
PHONE: +44 (0)1224 460 850
Monday – Friday, 9AM – 5PM GMT