AUV / ROV Flooded Member Detection System – ISFMD Live Question & Answer Session.
Transcript
Hello and welcome to this week’s live session from Impact Subsea here on YouTube. I’m Ben Grant, Managing Director of Impact Subsea and as always I’ll be answering your questions live here on our sensors.
Over the past few weeks we’ve looked at different sensors from Impact Subsea. We’ve looked at our ISA500 altimeter range, the ISD4000 depth and temperature sensor range, ISM3D AHRS sensor and we’ve looked at our ISS360 scanning sonar range.
This week we’re going to look at the ISFMD system which is the AUV / ROV Flooded Member Detection System from Impact Subsea.
What is a Flooded Member?
For those who don’t know, flooded member detection systems are intended for use underwater and are used to determine whether a member or structure has flooded and filled with water or liquid or if it’s filled with a gas.
For example if you’ve got a structure of an offshore platform, these are usually all welded together, they’re sealed against water so it should just be air, a gas inside the structure and over time corrosion can creep in and then water will get into the structure itself at which point you get a concerned that there may be fatigue in the structure or weakness in the structure occurring due to that water ingress and so it’s important to regularly go around subsea structures and check them and just make sure they haven’t flooded.
There are a number of different ways of doing this, there’s a radioactive source method, the gamma ray method and then there’s the use of acoustics which is the type of system we provide with the AUV / ROV Flooded Member Detection System – ISFMD.
AUV / ROV Flooded Member Detection System ISFMD Introduction
Our AUV / ROV Flooded Member Detection System is based around a single probe. That’s the probe in its housing there and it’s based on the ISA500 sensor at its core.
There’s a 500 kilohertz ultrasonic probe transmits acoustic pulse into the water and around about six degree conical beam and when you’re using it for flooded member detection work and you take the probe, you put it right up against the surface of the member and it will then transmit the force of sound into that member.
If the member is full of liquid the sound will travel through the member, hit the back wall of the member and be reflected back again to the probe at which point the probe picks it up as a return and it measures the diameter of the member. If that happens, then it’s classed as a flooded member.
If you put this up against a dry member, the sound is transmitted into the member and the 500 kilohertz signal very quickly attenuates and is absorbed by the air inside the member and it never hears any reflection coming back again.
The system is quite simple in principle. If it sends the sound in and it hears a sound coming back again, it assumes it’s flooded and it verifies this because the sound will take the required time to travel the diameter of the member and back again. It will report exactly the member diameter as the distance is measured.
If the member is dry, it will transmit sound in and it will hear nothing back so it’s quite simple in principle.
We supply the titanium probe and we also provide a holder here which is an acetal holder and two stainless steel bars. These can be used by a diver to hold the probe and push it up against the member or it can be used by a work class ROV for the manipulator to hold on to that and move the probe around.
If you’re using it on a smaller ROV the probe itself can come out of this holder and you can mount it directly onto the small ROV and just fly the ROV up against the member. Hold it against the member while you take a reading.
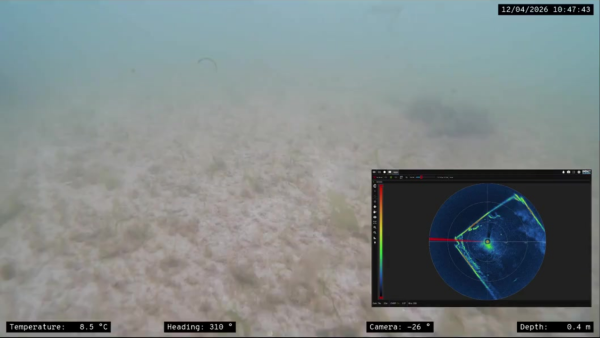
In terms of telemetry I’ve got a diver system here today so I’ve got the probe, the cable which runs back into this blue cable and the reel you can see there behind me. The reel then runs up to a top side interface box and then to a PC which is running our FMD software as can be seen in the background there.
The software is very user-friendly, it’s really intuitive. In the top left hand corner you’ve got a little mimic of the probe. As I move the probe in real time you can see it on screen moving. This is quite useful, especially if you’re top side, working with the software and you’re coordinating the FMD project with a diver.
I could tell the diver; please put the probe at six o’clock position. You can see on the screen once it’s been correctly positioned. I can see it at any other position it’s at any one time.
In the middle of the screen, at the top you have the acoustic returns. If the probe pings into a member, it’ll show you any returns that come back there. On the right hand side, it automatically classifies the member as dry, flooded or part flooded. Part flooded is where you maybe put the probe up against a member, maybe underneath the member, it’s pinged into the member but it hasn’t read the entire member diameter but it’s got a return at a shorter distance so that might indicate that the member is just partially flooded and not fully flooded.
Down at the bottom, in the middle you’ve got your member set up. You can set up the member diameter and you can set up the speed of sound, the transmit power and things like that. The left hand side you have a list of members so you can preset a whole lot of members prior to starting the project then work through member by member taking readings.
How does the AUV / ROV Flooded Member Detection System determine whether there is the presence of liquid within a member?
To show you how this works, if you took the probe, I’m just going to drop it into our test tank here to simulate a flooded member just for ease of demo. That’s dropped in there and if you go in the software and click ping. You can see in the software we got a return at about a meter value which is the diameter of the member I’ve set up and it’s just been classified as flooded.
If I take the probe out of the water to dry it off. We’ll do another test ping just in the air this time. So ping there, this time I see no reflection and it’s classified as a dry reading. This is pretty quick and easy to understand how the system works.
For those who want to know more about how the system works, how to set it up, how to use the software, we’ve got a couple of really good videos on our website. On the AUV / ROV Flooded Member Detection System ISFMD page.
One video shows you how to physically set up the entire system, how to plug the cable together, get it all connected to your laptop. The other video shows you the software interface so it shows you setting up for the first time and then takes you through actually getting readings as well.
Those videos they’re both quite short about 10 minutes in total but well worth viewing if you want to learn more about how to do flooded member detection.
That’s the system overview, some of the questions that we get asked about this system.
What power requirements are there for the probe?
One is; What are the power requirements for the probe? The probe itself run anywhere from nine to 36 volts DC. All the electronics are contained in the probe itself so there’s no separate bottle for use subsea. Everything’s just in the probe and a cable straight back to a surface or into your ROV telemetry. In terms of the ROV telemetry, the probe can work over RS232 comms or it can work into RS485 comms so it can work on pretty much any underwater vehicle.
In practice what is the minimum cleaning that should be done to the structure under test?
Another question we often get asked is: What’s the minimum level of cleaning that I need to carry out to the members prior to conducting the FMD test? This is an acoustic based system so it’s quite important that the probe itself gets reasonable contact with the member under test. What we tend to recommend is spot cleaning so just spot cleaning in the areas that you require to carry out a test on the member and that will allow the probe to align to the member and be able to transmit a sound through the member and get a good sound coming back again if it’s flooded.
How can I upgrade my ISA500 with the ISFMD functionality?
Another question we sometimes get asked is from users who already have the ISA500 altimeter which is also an echo sounder: Can I upgrade the sensor to be an FMD system? The answer is yes. If you have an acoustic based system, if you have an ISA500 with a part number of 1336 or 1220 then we can provide a software license and then that ISA500 will be ready to carry out FMD work.
I’m just getting a warning that our connection is a little unstable so apologies if we’re breaking up.
Is the system affected by strong magnetic presences.
Another question we have occasionally been asked is: Is the system affected by strong magnetic presences? The system is entirely operating on acoustics so any magnetics around the system won’t affect your acoustic reading. The only thing that might get affected is the little mimic of the probe on screen. The probe itself does have heading capability so you might just see that rotating on screen but in terms of the attitude of the probe, that’ll be correct and all your FMD readings will be correct as well.
Do you provide training on the AUV / ROV Flooded Member Detection System?
One final question we occasionally get asked is: Do you provide training on the AUV / ROV Flooded Member Detection, ISFMD system? We do on occasion but typically we tend to refer people to the two videos on our website here on our YouTube page as well.
The setup video and the software demonstration video, those two videos typically will give you enough information to get started with AUV / ROV Flooded Member Detection Systems.
That’s all the questions we commonly get asked and that’ll be all for this week so thank you for watching and we’ll see you next week.
► OUR PRODUCTS ◄
► SUBSCRIBE ◄
► LETS CONNECT: ◄
► GET IN TOUCH ◄
EMAIL: info@impactsubsea.co.uk
PHONE: +44 (0)1224 460 850
Monday – Friday, 9AM – 5PM GMT