ROV / AUV AHRS – ISM3D Live Question & Answer Session.
Transcript
I’m Ben Grant Managing Director of Impact Subsea and as always I’ll be answering any questions you may have live, here on YouTube.
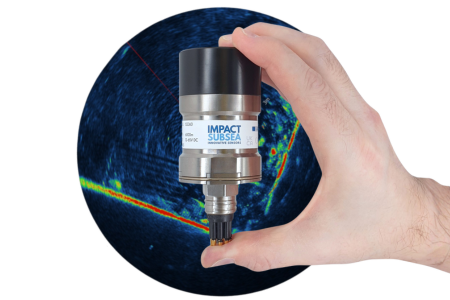
Now this week we’re going to talk a little bit about the ISM3D AHRS sensor. So this is the sensor itself here. It’s the smallest sensor Impact Subsea manufacturers and it’s an attitude and heading reference system. It provides you with heading, pitch and roll.
The sensor itself has a flat end here and has four holes for mounting it down so if you’ve got an ROV you can mount it to a plate there or if it’s going on a subsea structure that’s a great place to mount it and get it really solidly connected to the structure of the vehicle. Alternatively there is also a recess around the middle of the sensor which actually allows you to put a standard u-clamp around it and lock it in securely.
Other than that, aside from mounting it you’ve got the connector for electrical connection just a standard subcon which has the same pin outs as all the Impact Subsea sensors. The sensor itself; it’s available in titanium metal which is this one here and depth rated down to 6,000 meters.
We also do the same sensor in exactly the same size of housing in acetal plastic and that sensor is depth rated down to 1,000 meters. It’s a lighter weight version and it’s ideal for small vehicles and anywhere where weight is a consideration.
The sensor itself provides you with heading to magnetic North to +/- 1 degree of the local magnetic heading. In terms of the attitude, it gives you a pitch and roll to 0.07 degrees accuracy so it’s highly compact but also high accuracy attitude sensor.
Does the ROV / AUV AHRS have magnetic immunity to steel structures?
We get a number of questions on the ISM3D one of the most common ones is ‘How good is it when it comes to Magnetic Immunity?’ If you’re on a vehicle and you’re working around steel structures, how well does it keep the heading?
I guess to answer that I have to tell you a little bit about how the sensor works.
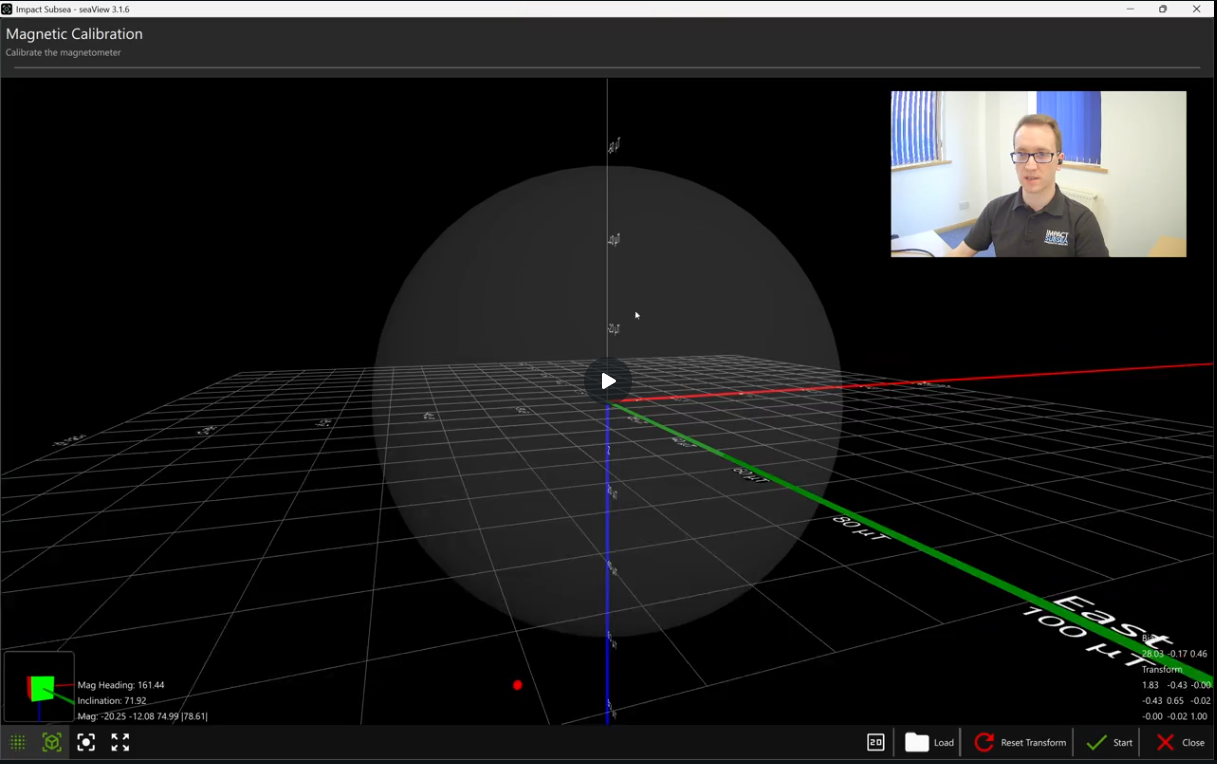
The ISM3D has two modes of operation; the first mode is basically magnetic heading so it follows it like most mems based magnetic sensors and inside the sensor it’s got three magnetometers, three gyroscopes and three accelerometers.
The accelerometers and gyroscopes are relatively high grade so it gets the high grade attitude readings. When you’re working on magnetic heading the magnetometers find North on initial power up and then they’ll follow magnetic North and they’ll be slaved to the gyros and accelerometers.
The gyros will help prevent any temporary magnetic interference without effecting the heading. If you have a temporary magnetic interference come alongside it the magnetometers will quickly spin off and point towards it or be moved by it but the gyros will realise there’s not been any physical movement, it’ll hold that heading. If the magnetic presence sits there for a long time heading will slowly creep round and offset to it.
Inertial Mode
That’s the basic mode of operation however it’s got a more advanced mode of operation which is probably the number one reason that people purchase the ROV / AUV AHRS, ISM3D is its inertial mode.
In inertial mode when you power up the sensor and on initial power up for the first 10 seconds or so it uses the magnetometers to locate North then after 10 seconds the Heading update gets handed over to the gyroscopes and accelerometers and so after 10 seconds of operation it will have a heading and you can bring it alongside a magnetic structure, even a strong magnet right next to it and the heading won’t move at all, even if the magnet’s left there for hours and hours.
The Heading won’t adjust at all because it practically ignores the magnetometers. It just changes the heading based on the gyroscopes. This gives you a really reliable heading which is ideal for operation around steel structures or any other structure that has a magnetic element to it.
In terms of drifts, usually you don’t want to do that kind of setup with a low-grade mems sensor because what you get is drift over time and there’s nothing to correct the error. With the ISM3D you can sit it on a desk and don’t move it for 24 hours before you get about one to two degree drift just from a static installation.
Where you get error building up in the heading is from dynamic motion when working in inertial mode and that’s due to integration error of which gyros.
If you’re on a large work-class vehicle which many of the ROV / AUV AHRS ISM3Ds are, you can maintain operations for many hours because the dynamic motion usually is relatively slow or if you put this onto a small vehicle, such as a small Videoray or a vehicle that kind of size, you’ll find if you move very quickly and rapidly error will build up on the heading.
At any point you can move away from the steel structure, click re-align to magnetic North or you can power cycle it and it will re-align magnetic North and give you a good base to start from again.
Can I swap out my existing heading sensor with this?
Another question we often get asked is: ‘Can I swap out my existing heading sensor with the ISM3D?’ and the answer is; yes, of course. We’ve done a few things in the ISM3D to make that a really simple process.
The ROV / AUV AHRS ISM3D can output Impact Subsea strings and output basic strings such as heading pitch and roll. It can output more advanced strings that have quaternion values to calculate the heading and the orientation of the sensor.
It can also output any industry standard string so the sensor has an emulation capability, we can emulate any other heading sensor or pitch and roll sensor out there in the market.
This means you can configure the ISM3D very quickly, just plug into your system without any re-engineering of your ROV or system that you have.
What are the physical interface details?
In terms of the physical interface it has RS232 and RS485 serial interfaces in it and can work on any of the standard baud rates as well so interfacing and integrating with ISM3D is usually are relatively straightforward task.
Are there OEM options available?
Another question we occasionally get asked is ‘Are there OEM options available of the ISM3D?’ The majority of ISM3D units are either in a titanium housing or in a plastic, acetal housing. They are highly compact and they work with the majority of applications that we see.
We do also offer an OEM version which is a PCB only solution so if you don’t want the housing, if you don’t want the connector and you want to integrate it directly into say, a very small AUV AHRS it’s your own electronics pod and then we offer that option as well.
I think that’s all the details on the ROV / AUV AHRS ISM3D sensor. Just checking but I’ve not had any questions come through this morning so we’ll end the session there.
If you want any more information on the ROV / AUV AHRS ISM3D you’ll find the latest data sheet, manuals, demonstration videos and more technical information on our ISM3D product Page
or you can drop us an email at support@impactsubsea.co.uk we’ll answer any technical questions that you have.
Bye for now.
► OUR PRODUCTS ◄
► SUBSCRIBE ◄
► LETS CONNECT: ◄
► GET IN TOUCH ◄
EMAIL: info@impactsubsea.co.uk
PHONE: +44 (0)1224 460 850
Monday – Friday, 9AM – 5PM GMT