Unity is a topside control system comprising of a computer running seaView software, an Ethernet and Serial communications interface and power supply for use with Impact Subsea sensors. All combined into a 1U high 19” rack mountable solution.
When operated together with seaMux, the two create a complete system solution for a suite of Impact Subsea sensors, collecting and outputting data to third party systems. Third party serial or ethernet data can also be input to seaMux and output at the surface via Unity.
The system is intended for use on Remotely Operated Vehicles (ROV) and a variety of underwater applications where multiple sensors are required.
The Unity, Topside Control System acts as a central hub for subsea operations, providing a 1U high, 19-inch, rack-mountable computer that runs the comprehensive seaView software.
Unity is equipped with four communication ports that can operate on RS232, RS485 or Ethernet, offering flexible interface options for both sensors and third-party systems.
Each of these ports features a software-controllable 24VDC power output, enabling the unit to locally power connected sensors.
Through the seaView software, users can operate Impact Subsea sensors, view real-time data, log data and manage the onward transmission of data to survey systems.
Finally, the system supports direct Ethernet or VDSL connection to the subsea seaMux unit to complete the link between the surface and subsea.
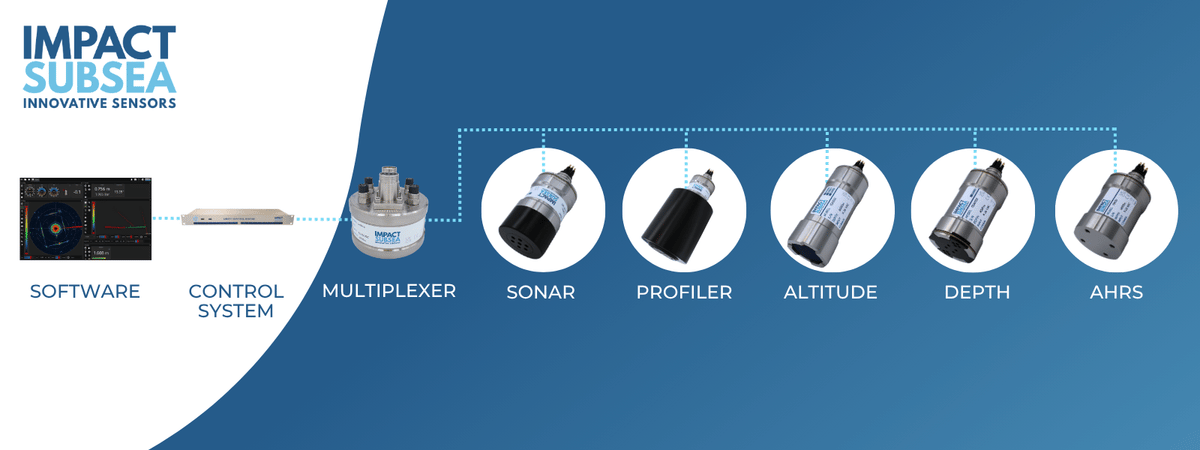
Impact Subsea’s sensor suite, paired with the seaMux Subsea Multiplexer and the Unity Topside Control System, provides a powerful, integrated solution for Remotely Operated Vehicle (ROV) operations.
For ROV integration, the seaMux acts as the essential subsea hub, allowing multiple sensors, such as sonars, profilers, altimeters, depth sensors and AHRS, to be connected through a single, titanium-housed multiplexer.
By utilising the seaMux, ROV operators can significantly simplify cabling requirements, as the system transmits all sensor data to the surface via a single Ethernet or VDSL connection.
At the surface, the Unity Topside Control System acts as the central interface, providing a streamlined 19″ rack-mountable system that manages data logging through the seaView software and facilitates the output of data to external survey systems.
This seamless combination of subsea and topside hardware enables efficient sensor networking, reduced topside footprint and reliable operation across both shallow and deep-water ROV missions.
The integration of Impact Subsea technology into a survey suite creates a high-performance, unified data environment.
By combining the seaMux Subsea Multiplexer and the Unity Topside Control System, survey teams can achieve seamless, efficient sensor networking.
Within a survey suite, the seaMux acts as a robust subsea hub. It facilitates the connection of an array of instruments including sonars, profilers, altimeters, and depth or AHRS sensors, alongside third-party serial or Ethernet-based devices.
This reduces complexity by consolidating these connections into a single, titanium-housed unit, which then transmits all aggregated data to the surface via a high-bandwidth Ethernet or VDSL connection.
At the topside, the Unity Control System serves as the primary survey integration point.
This integrated approach allows survey professionals to maintain full control over their sensor suite, ensuring that all data, from precision navigation to acoustic imaging, is efficiently captured, managed, and output to the survey station.
The Unity Control System serves as a versatile central hub for stand-alone system integration, providing a robust, 19-inch rack-mountable computer that runs the comprehensive seaView software.
It is designed to act as the primary interface for managing diverse sensor suites in various fixed or mobile underwater configurations. For stand-alone integration, the system offers four communication ports that support RS232, RS485, or Ethernet connectivity, allowing for the direct interface of Impact Subsea sensors alongside various third-party serial or Ethernet-based devices.
Unity simplifies system architecture by providing software-controllable 24VDC power outputs on each port, which allows operators to locally power connected sensors without the need for additional complex power distribution hardware. Through the seaView software, operators maintain full oversight of the installation, with the ability to view real-time data logs, monitor the current draw of individual sensors, and manage data throughput. This centralized control, housed within a compact 1U high form factor, ensures that stand-alone sensor networks remain organized, efficient, and easily configurable for specific survey or monitoring requirements.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}